

 简体中文
简体中文 English
English Français
Français Español
Español Português
Português蓝牙作为一种低功耗、高兼容性的短距离通信技术,已在汽车数字钥匙领域广泛应用。通过车端与移动端设备的协同,蓝牙技术可精准感知数字钥匙位置,实现无感解锁/闭锁功能,显著提升用户用车体验。本文将对三种主流蓝牙定位技术——接收信号强度(RSSI)、到达角/离去角(AoA/AoD)和信道探测(Channel Sounding)进行简要评估,探讨其在汽车数字钥匙领域的应用优势与局限。
RSSI定位是根据信号在两个设备之间无线传输中随距离衰减程度进行距离估算的一种方式。以蓝牙Beacon为例,蓝牙Beacon是RSSI定位的一种,蓝牙Beacon可以采用三角测量的定位方案也可以采用指纹定位的方案。三角测量的定位方案是通过至少三个基站信号测距结果,算出目标的位置,但是易受到环境影响;指纹定位的方案,根据提前采集的指纹库进行匹配来计算目标位置,对于复杂环境适应性较好,但是易受到环境变化影响。
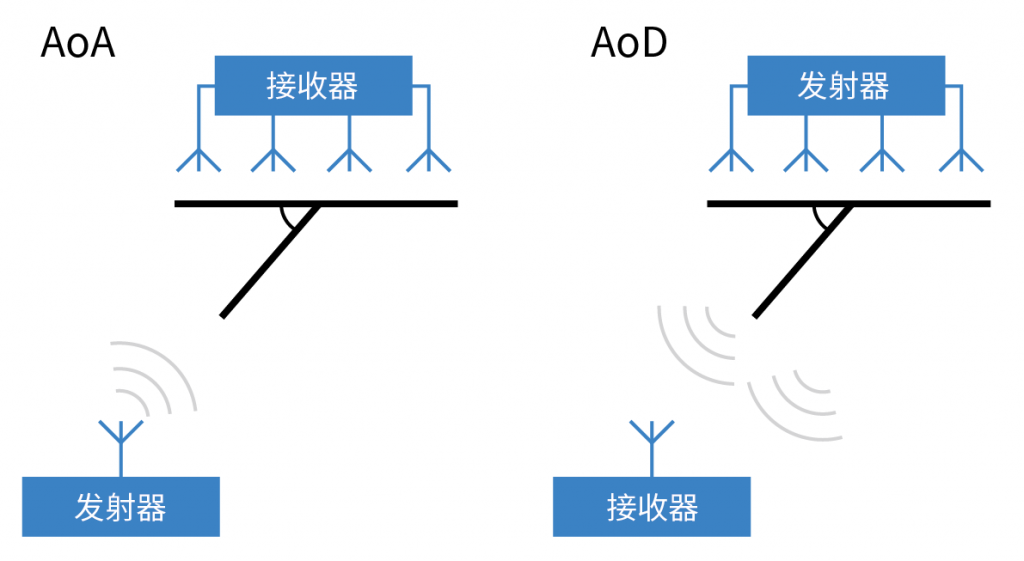
AoA/AoD定位算法,是在蓝牙5.1标准中引入的定位方法,通过计算蓝牙设备多天线间的信号相位差来计算出接收器和发射器之间的相对角度,并利用多角度交汇来计算目标位置。
AoA是一种利用接收天线阵列的相位差来估计到达角度的方法,发射器使用单个天线发射信号,而接收器内置至少两个天线单元的阵列,当信号通过时,会因信号到达每个天线的距离不同而产生相位差,进而计算出发出信号目标的方向。AoD的原理相同,只是将发射器和接收器的角色进行了交换,发射器使用多天线阵列发射,而接收器使用单天线接收。
理论上蓝牙AoA/AoD定位精度可以做到亚米级(1m以内)。但在实际应用中,定位精度受锚点安装位置精度和姿态角的精度影响较大,并随着到锚点距离增加而降低。
包含CS(Channel Sounding)功能的新版蓝牙6.0标准于2024年8月发布。CS是一种通过往返时间(Round-Trip Time)和相位测量(Phase-Based Ranging)来进行距离估算并相互修正的技术,其具备更高测距精度和更安全的防护机制。
• 往返时间(RTT)是指信号从发射器到接收器并再次返回所需的持续时间。
• 相位测距(PBR)是一种利用RF信号的相位变化从而确定距离的方式。PBR通过收发两端的信号相移来计算距离,但存在多解问题。使用多个不同频率的信号可以测量信号之间的相位差来消除多解情况。
当使用CS技术计算距离时,发射器(Initiator)和接收器(Reflector),通过72个RF物理信道交换信息。首先由发射器和接收器完成简单时间同步,然后由接收器在不修改相位的情况下反射信号。在完成多个频率上信息交换过程后,发射器测量其所发射信号和接收器反射信号之间的相位变化,实现精确的距离计算。
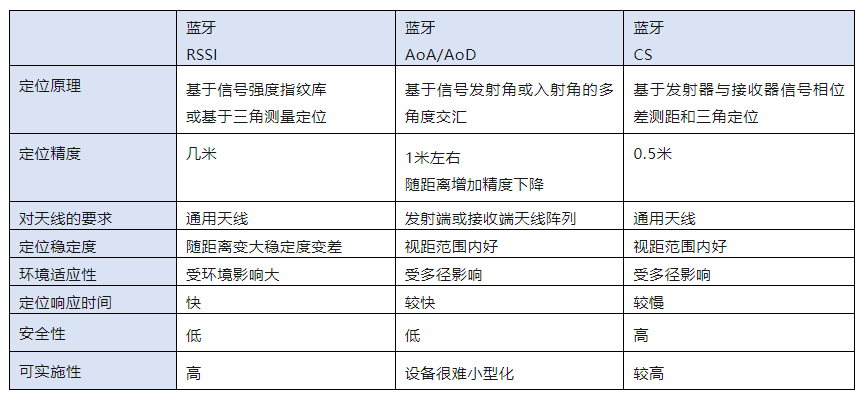
总的来说,CS相较于RSSI而言,定位精度提升明显,理想状态下CS的定位精度可以做到1m以内;此外,CS和RSSI相比稳定性提升了很多。CS相较于AoA/AoD而言,最大的优势是不需要使用天线阵列,从而减小设备体积。另外,CS提供增强的内置安全功能——通过基于交互式的相位测距算法和RTT数据加密,可以降低“中间人”攻击风险。
下图是使用NXP KW45芯片进行的蓝牙CS性能测试,图中曲线为各距离的测距结果随实际距离的偏差分布,不同颜色的曲线代表不同距离解算方法的结果。从图中可以看出,蓝牙CS在25米范围内的测距偏差一致性和测距结果散布良好。

(软件生成图)
握奇在蓝牙定位技术领域(涵盖RSSI、AoA/AoD和Channel Sounding等)积累了深厚的研发实力,并凭借丰富的项目实施经验,成功交付了高质量的解决方案。展望未来,握奇将持续聚焦技术创新和服务升级,积极应对市场变化与客户需求,为客户打造更具竞争力的产品和服务。我们期待与更多合作伙伴携手共进,推动行业发展,共创美好未来。