

 簡體中文
簡體中文 English
English Français
Français Español
Español Português
Português藍牙作為一種低功耗、高兼容性的短距離通信技術,已在汽車數字鑰匙領域廣泛應用。通過車端與移動端設備的協同,藍牙技術可精準感知數字鑰匙位置,實現無感解鎖/閉鎖功能,顯著提升用戶用車體驗。本文將對三種主流藍牙定位技術——接收信號強度(RSSI)、到達角/離去角(AoA/AoD)和信道探測(Channel Sounding)進行簡要評估,探討其在汽車數字鑰匙領域的應用優勢與局限。
RSSI定位是根據信號在兩個設備之間無線傳輸中隨距離衰減程度進行距離估算的一種方式。以藍牙Beacon為例,藍牙Beacon是RSSI定位的一種,藍牙Beacon可以採用三角測量的定位方案也可以採用指紋定位的方案。三角測量的定位方案是通過至少三個基站信號測距結果,算出目標的位置,但是易受到環境影響;指紋定位的方案,根據提前採集的指紋庫進行匹配來計算目標位置,對於複雜環境適應性較好,但是易受到環境變化影響。
AoA/AoD定位算法,是在藍牙5.1標準中引入的定位方法,通過計算藍牙設備多天線間的信號相位差來計算出接收器和發射器之間的相對角度,並利用多角度交匯來計算目標位置。
AoA是一種利用接收天線陣列的相位差來估計到達角度的方法,發射器使用單個天線發射信號,而接收器內置至少兩個天線單元的陣列,當信號通過時,會因信號到達每個天線的距離不同而產生相位差,進而計算出發出信號目標的方向。AoD的原理相同,只是將發射器和接收器的角色進行了交換,發射器使用多天線陣列發射,而接收器使用單天線接收。

理論上藍牙AoA/AoD定位精度可以做到亞米級(1m以內)。但在實際應用中,定位精度受錨點安裝位置精度和姿態角的精度影響較大,並隨着到錨點距離增加而降低。
包含CS(Channel Sounding)功能的新版藍牙6.0標準於2024年8月發布。CS是一種通過往返時間(Round-Trip Time)和相位測量(Phase-Based Ranging)來進行距離估算並相互修正的技術,其具備更高測距精度和更安全的防護機制。
• 往返時間(RTT)是指信號從發射器到接收器並再次返回所需的持續時間。
• 相位測距(PBR)是一種利用RF信號的相位變化從而確定距離的方式。PBR通過收發兩端的信號相移來計算距離,但存在多解問題。使用多個不同頻率的信號可以測量信號之間的相位差來消除多解情況。
當使用CS技術計算距離時,發射器(Initiator)和接收器(Reflector),通過72個RF物理信道交換信息。首先由發射器和接收器完成簡單時間同步,然後由接收器在不修改相位的情況下反射信號。在完成多個頻率上信息交換過程後,發射器測量其所發射信號和接收器反射信號之間的相位變化,實現精確的距離計算。
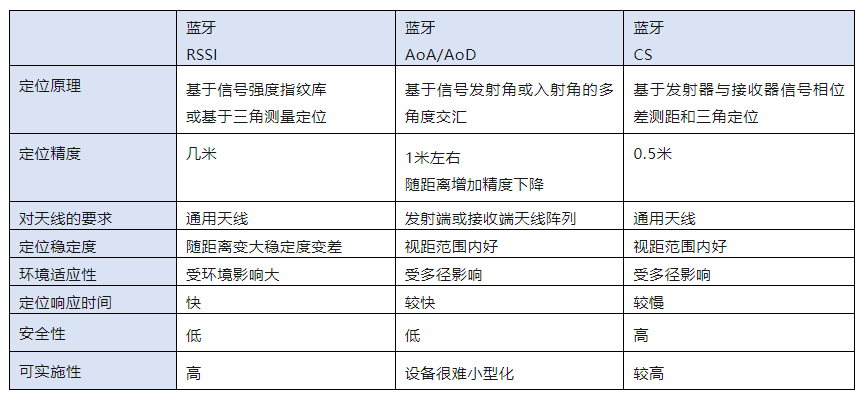
總的來說,CS相較於RSSI而言,定位精度提升明顯,理想狀態下CS的定位精度可以做到1m以內;此外,CS和RSSI相比穩定性提升了很多。CS相較於AoA/AoD而言,最大的優勢是不需要使用天線陣列,從而減小設備體積。另外,CS提供增強的內置安全功能——通過基於交互式的相位測距算法和RTT數據加密,可以降低“中間人”攻擊風險。
下圖是使用NXP KW45芯片進行的藍牙CS性能測試,圖中曲線為各距離的測距結果隨實際距離的偏差分布,不同顏色的曲線代表不同距離解算方法的結果。從圖中可以看出,藍牙CS在25米範圍內的測距偏差一致性和測距結果散布良好。

(軟件生成圖)
握奇在藍牙定位技術領域(涵蓋RSSI、AoA/AoD和Channel Sounding等)積累了深厚的研發實力,並憑藉豐富的項目實施經驗,成功交付了高質量的解決方案。展望未來,握奇將持續聚焦技術創新和服務升級,積極應對市場變化與客戶需求,為客戶打造更具競爭力的產品和服務。我們期待與更多合作夥伴攜手共進,推動行業發展,共創美好未來。